DYNASMART
DYNASMART (DYnamic Network Assignment-Simulation Model for Advanced Road Telematics)
is a discrete time mesoscopic simulation model for ATMIS applications. It is
designed to model traffic pattern and evaluate overall network performance under
real-time information systems. UCI has also been enhacing the features of DYNASMART
for the real-time analysis of advanced transportation managment systems as a
core model of the UCI Testbed.
DYNASMART has also been further developed by the University of Texas at Austin,
and employed as one of candiadte models for the FHWA's
DTA (Dynamic Traffic Assignment) project with DynaMIT. Currently two versions
of DYNASMART are avaiable in the DTA project: DYNASMART-X for real-time analysis
and DYNASMART-P for planning.
The original capabilities of DYNASMART include:
1) Macroscopic modeling of traffic flow dynamics such as congestion formation
and shock wave propagation. Tracking of location of individual drivers.
2) Modeling of different traffic control strategies (freeways, surface streets,
signalized intersection, ramp entry/exit etc.)
3) Modeling of prescriptive /compulsory guidance as well as non-prescriptive
guidance with trip time information on alternative routes.
4) Modeling of various aspects of the controller such as infrequent updates
of network route information database.
5) Modeling of individual drivers' response to information in the case of descriptive
guidance based on a set of paths rather than a single shortest path. Random
assignment of driver behavioral characteristics. Flexibility to incorporate
alternative behavioral rules.
6) Modeling of capacity-reducing incidents at any time, anywhere in the network.
7) Modeling of cases with only a fraction of the vehicles equipped for information.
8) Capacity to carry out simulations based on externally specified dynamic equilibrium
paths for drivers not equipped to receive information.
9) Several levels of output statistics for the system, for individual drivers
as well as for groups of drivers (equipped drivers, unequipped drivers, drivers
on certain O-D pairs etc.). Statistics include average trip time, distances,
average speeds and a variety of routes switching statistics.
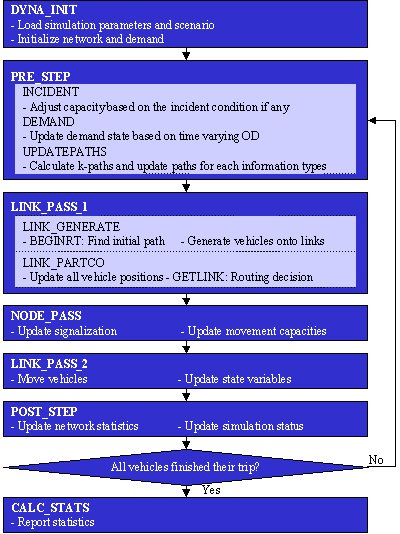
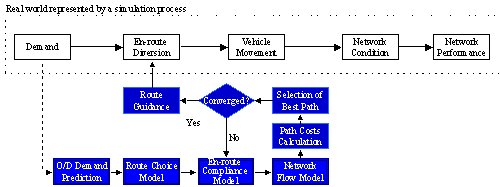
The basic DYNASMART simulates individual vehicles along the paths selected
out of k-shorest paths, and vehicles make its route decision based on their
characteristics and information acquisition capability. The following diagram
shows how vehicles are moving in DYNASMART.
DYNASMART for Dynamic Optimal Route Guidance and Control
Various information/route guidance systems are modeled in DYNASMART-UCI with
following considerations.
· Types of Information Devices: IVNS, CMS, Radio information
· Use of Information: Market penetration, compliance rate (or level of
reliability)
· Types of Routing Strategies: Instantaneous, Predictive (UE/ SO)
· Information accuracy: Data aggregation and information update interval
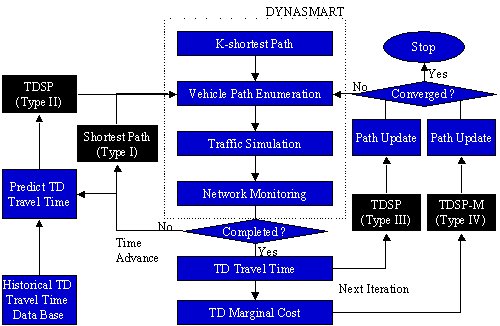
Four types of optimal route guidance are modeled reflecting different optimal
route selection procedures:
· TYPE I: Instantaneous information
· TYPE II: Predictive information with information discounting strategy
· TYPE III: Dynamic user optimal routing (average cost routing)
· TYPE IV: Dynamic system optimal routing (marginal cost routing)
These four types do indeed capture most of the existing and envisaged IVNS
in the world. Type I and II are straightforward in their modeling. In the Type
I, the shortest route is selected directly from the uses most updated travel
time information. Type II seeks the time-dependent shortest path using projected
time-dependent travel times. For the time-dependent travel time projection,
the information discounting strategy is employed. Route guidance schemes of
Type III and IV are obtained via multi-user class dynamic traffic assignment
procedure. Route guidance schemes are represented by number of vehicles departing
from origin i to destination j during time period t via path k. Difference between
Type III (dynamic user equilibrium, DUE) and Type IV (dynamic system optimum,
DSO) is the objectives applied. While the resulting traffic pattern from Type
III minimizes individual vehicles travel time, that from Type IV minimize the
total travel time spent in the network by all vehicles. The route guidance schemes
for Type III and IV are obtained via iterative approach. Every iteration optimal
paths are found via time-dependent shortest path routine. Time-dependent average
travel times are used for DUE, whereas time-dependent marginal travel times
are used for DSO. The solutions for this type of route guidance are based on
the full knowledge assumption.
Real-time Control Systems in DYNASMART
Control systems in DYNASMART can be classified into several classes in terms
of their algorithmic structures. Their algorithmic structures are decided by
adopting one type from three categories:
- user optimal vs. system optimal
- instantaneous vs. predictive
- open-loop vs. closed-loop system
When the second and third categories are considered, four routing approaches
exist as follows.
- Simple feedback approach: instantaneous travel time based feedback system
- Simple predictive approach: historic data based prediction system
- DTA approach: dynamic traffic assignment based open-loop system
- DTA feedback approach: traffic assignment based feedback system
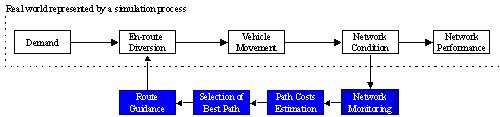
Simple Feedback Approach
The simple feedback approach seeks optimal routes based on instantaneous travel
time at every instant. The control interval is dependent on the capacity and
speed of data processing. The main drawback of the system is that the "optimal"
routes at various instances may not be really optimal when reviewed after trip.
However, this approach does not require any other input other than link travel
times. Measurement errors in network monitoring system are the only source of
disturbance. Other disturbances including drivers' compliance rate are reflected
through network conditions. This approach can also be applied independently
without conflict with other infomation devices. That is, advantage of this approach
is not only that it is simple and easy to implement but that it is also robust
in application.
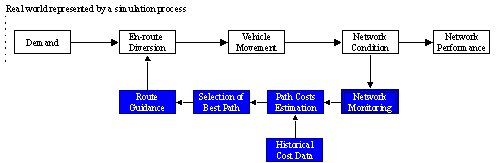
Simple Predictive Approach
With increasing interest in dynamic route guidance, there have been many studies
on short-term travel time prediction. Travel time prediction models studied
include time series analysis, Kalman filtering models, neural network models,
and historical and real-time profiles .The simple predictive approach utilizes
historical traffic data and real-time instantaneous traffic data. The historic
information is insufficient for drivers to find the optimal routes due to day-to-day
traffic variations. This method is based on a reasonable assumption that the
traffic information on the very next link in the network is reliable but the
current information on the farther areas will be less useful due to the temporal
variation of the link travel time.This approach reflects temporal variations
in traffic condition; however, it does not take drivers' route changes due to
the information. Success of this approach depends on the accuracy of historical
travel time data and similarity of daily traffic pattern.
Predictive DTA approach
The dynamic traffic assignment (DTA) approach is to optimize the network under
the assumption of full knowledge. Unlike instantaneous feedback approach, this
approach provides user optimal paths which are expected to be user-optimal after
the drivers "experience" the travel not just at an instant. In this
approach there is no feedback routine, and so this approach is classified as
an open-loop system that relies on perfect prediction. This approach assumes
that all prediction components are perfect. In fact, any imperfection of the
approach may worsen the system. In reality, there exist errors in every component,
such as O/D demand prediction, the route choice model, the compliance prediction,
and the network flow model. Therefore, this approach is hard to apply in real-life
unless the model is well validated, despite its attractiveness from a theoretical
point of view. This predictive approach can be used for both user optimal and
system optimal by applying average cost for user optimal and marginal cost for
system optimal. Similarly the proposed heuristic can be used for both cases.
In the dynamic case, it is almost impossible to find the true marginal costs
due to time-dependency, so that quasi-marginal costs are calculated and used
for marginal cost routing.
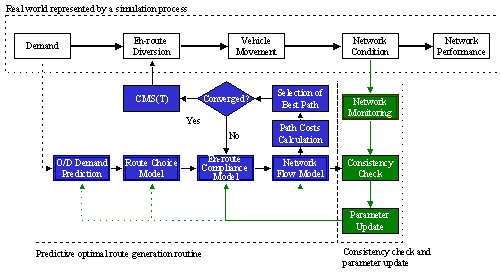
DTA Feedback Approach
The DTA feedback approach is similar to the rolling horizon version of predictive
approach in the sense that it seeks an optimal solution for demand during a
time interval via iterative method. However, this predictive feedback approach
optimizes parameters of each model components. This approach brings a lot of
issues with respect to on-line model calibration and interaction between model
components. The main issue of the approach is how to reflect stochastic nature
of the system into the prediction model. Some model parameters may need on-line
adjustment while some of them can be adjusted later. Difficulty of the adjustments
arises from the fact that the observed errors are a mixture of each model components'
errors. Basically, the aim of the approach is to minimize the gap between the
simulation model and real world.
|